Machine Learning in a Nutshell
Start writting from Mar 4, 2018
A brief introduction to ML for physicists
Machine Learning in a NutshellBasic Concepts in Math and Machine LearningOverview and HistoryGeneral SettingsLinear AlgebraStatistical InferenceJargon in MLNNN (Non-Neural-Network) approachesKNN (K-Nearest Neighbor)k-Means ClusteringMean ShiftSpectral ClusteringNaive Bayes ClassifierLDA (Linear Discriminant Analysis)PCA (Principle Components Analysis)Kernel PCAICA (Independent Component Analysis)NMF (Non-negative Matrix Factorization)CCA (Canonical Correlation Analysis)SVM (Support Vector Machine)Decision TreesRandom ForestRegressionGaussian ProcessManifold LearningProbability Graphical ModelsNN (neural network) familyFeed Forward Neural NetworkConvolutional Neural NetworkRecurrent Neural NetworkAutoencoderBoltzmann MachineMore Generative NetworksAdvanced ML approachesActive LearningSemisupervised LearningReinforce LearningTransfer LearningApplications in PhysicsAs wavefunctionsAs classifiers or generatorsAs recommendation systemsAs other toolsPhysics helps MLMain ReferenceSeries or booksPapers or blogs
Basic Concepts in Math and Machine Learning
Overview and History
This note is about the algorithm, principles and philosopy of machine learning. For implementations and general ideas in programming, I may write a separate note in the future. It is just a roadmap to ML, the details are lack, hence it is more like a dictionary than a tutorial. The aim of this note is to make the readers have a general idea about ML approaches. If you are going to learn more, see links and references in the note and get your hands dirty: writting code and playing with the math.
See the following posters to have a rough idea on tribes and history of ML.
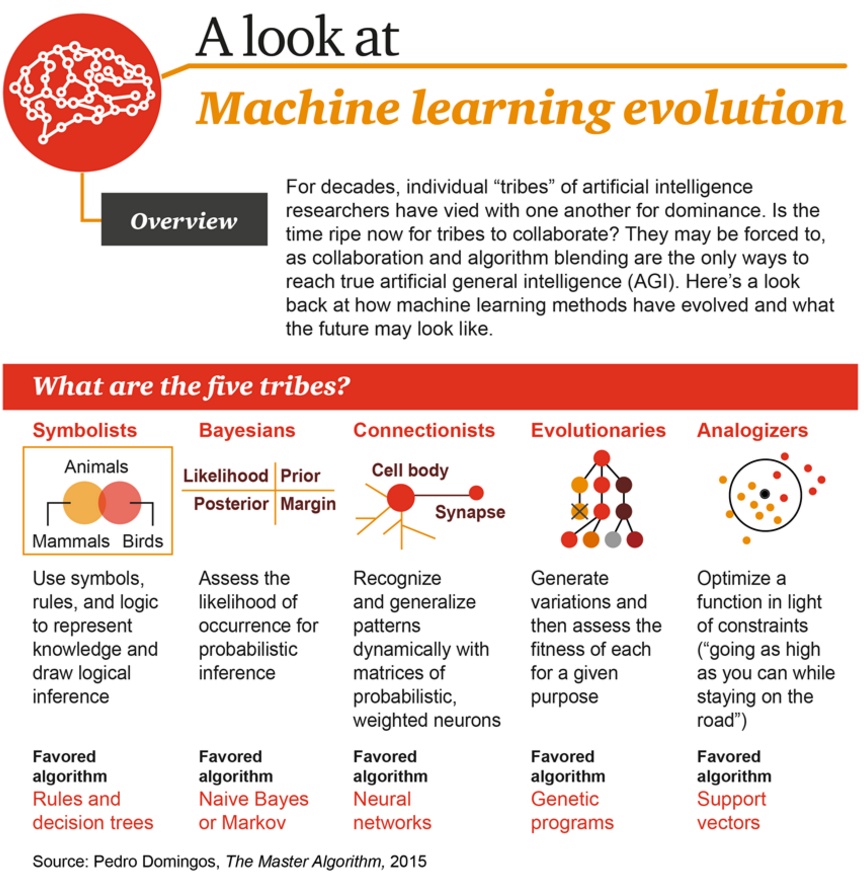
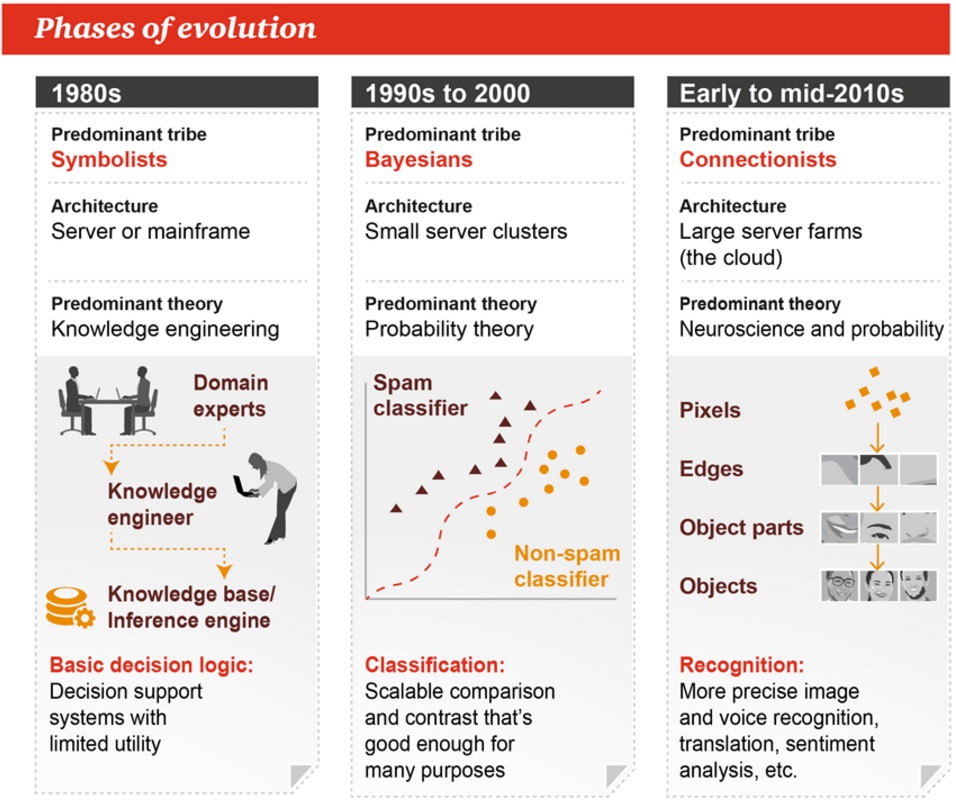
See this wiki for timeline of machine learning. See this post and the figure below for the trend and milestones of ML in history.

The two main communities in ML field:
- 「I do not come to AI to do statistics.」
- 「I do not have interest in AI.」
General Settings
Everytime we are faced with a dataset, how can we deal with it. So called data is just a group of number and we can arrange each data as a vector (for each component of the vector, we call it a feature), with or without labels. Labels in general is another vector (usually only one component) associate with data vectors. Now we have two different views on the whole dataset. We can stack all of the data vectors in rows and make the whole dataset as a matrix. Or we can treat the data vector as a random variable whose distribution is specified by the whole dataset implicitly. Therefore, we can play with dataset in the context of linear algebra or statistical inference. And we can further gain more insights if we note the intrinsic connections between the two fields in math.
Linear Algebra
SVD (sigular value decomposition)
For matrix in field , there exists a factorization, called a singular value decomposition of , of the form
where is dimension unitary matrix in field . The diagonal term of are single values. For singular vectors and construction of transformation matrix, see here.
Truncated SVD, use only matrix as to dramatically reduce the freedom representing the large matrix. For an application of truncated SVD in LSI (latent semantic indexing), see this post.
Rayleigh quotient For a given Hermitian matrix M and nonzero vector x, the Rayleigh quotient is defined as:
Such a value reaches the minimum value of the smallest eigenvalue of the matrix , when the vector is the corresponding eigenvector. And the similar scenario applies to the max value of the quotient. One can easily project the vector x into the eigenvector basis to prove this. This quotient is nothing but energy functional in quantum physics.
Curse of dimensionality
Data in very high dimension has many weird behavior comapred to 3D we are familiar with. Data points in higher dimension are sparse: the number of data points is exponential increasing with the dimension if you keep the density of data. Novel features in high dimension also include: the Euclidean distance betwenn all pairs of points are nearly the same; the volume of hypersphere with radius r is approaching zero compared to the cube with edge 2r. Therefore, many familiar approaches to manipulate and organize data don't work well in very high dimension.
Statistical Inference
Covariance
Covariance is defined for random variable
For a random variable vector, its covariance matrix is defined as
Suppose X is a random vector and A is a fixed transform vector, then we have the frequently used relation:
Multivariate Gaussian distribution
A random variable vector follows
where is the average vector and is the covariance matrix. The density function is of the form
The most useful feature of multivariate Gaussian distribution is the conditional distributions, the final result of condition distribution is
and
KL divergence (Kullback–Leibler divergence)
Defined as , where are two random variables and easily to be extended to the continuum version. Note this is not a symmtrical definition! This quantity characterizes the 'difference' of the two distributions. It is positive definite and be zero iff are the same distributions.
KL divergence of two Gaussian distributions is
Information entropy
For discrete random variable , the entropy is defined as .
We can also define conditional entropy as
And the joint entropy:
The joint entropy is greater than any individual entropy while no greater than the sum of them.
Also there is concepts of information gain which measure the difference of information entropy .
Mutual information
where are two random variables. It is non-negative.
Relations to conditional entropy:
Relation to KL divergence:
Perplexity
Perplexity of discrete distribution is defined as . A low perplexity indicates the probability distribution is good at predicting the sample
Whitening transformation
Make a linear transformation on the random variable vector so that the covariance matrix become the identity matrix (Of course such a definition can be generalized to the matrix case by the analogy in general setting section). Such transformation is not unique. The common approach to do that is PCA whitening.
Additive smoothing In statistics, additive smoothing, also called Laplace smoothing or Lidstone smoothing, is a technique used to smooth estimate probability of categorical data. Given an observation x = (x1, …, xd) N trials, a "smoothed" version of the data gives the probability estimator:
where is a small number called pseudocount. The original version of such formula comes from the rule of succession () which is designed to solve the sunrise problem. If you are confused with the prior ignorance and noninformative prior distributions, see this doc ,the cheatsheet or my blog.
MLE vs. MAP
Frequentist vs. Bayesian: whether we have some nontrivial prior knowledge of this world and if the parameter a fixed value or random variable. Maximum likelihood estimation () is equivalent to minmize the negative log likelihood. Maximum a posterior , has taken the prior into consideration. The two approach are point estimation compared to full Bayes analysis, where the posterior distribution is calculated. You may refer this article.
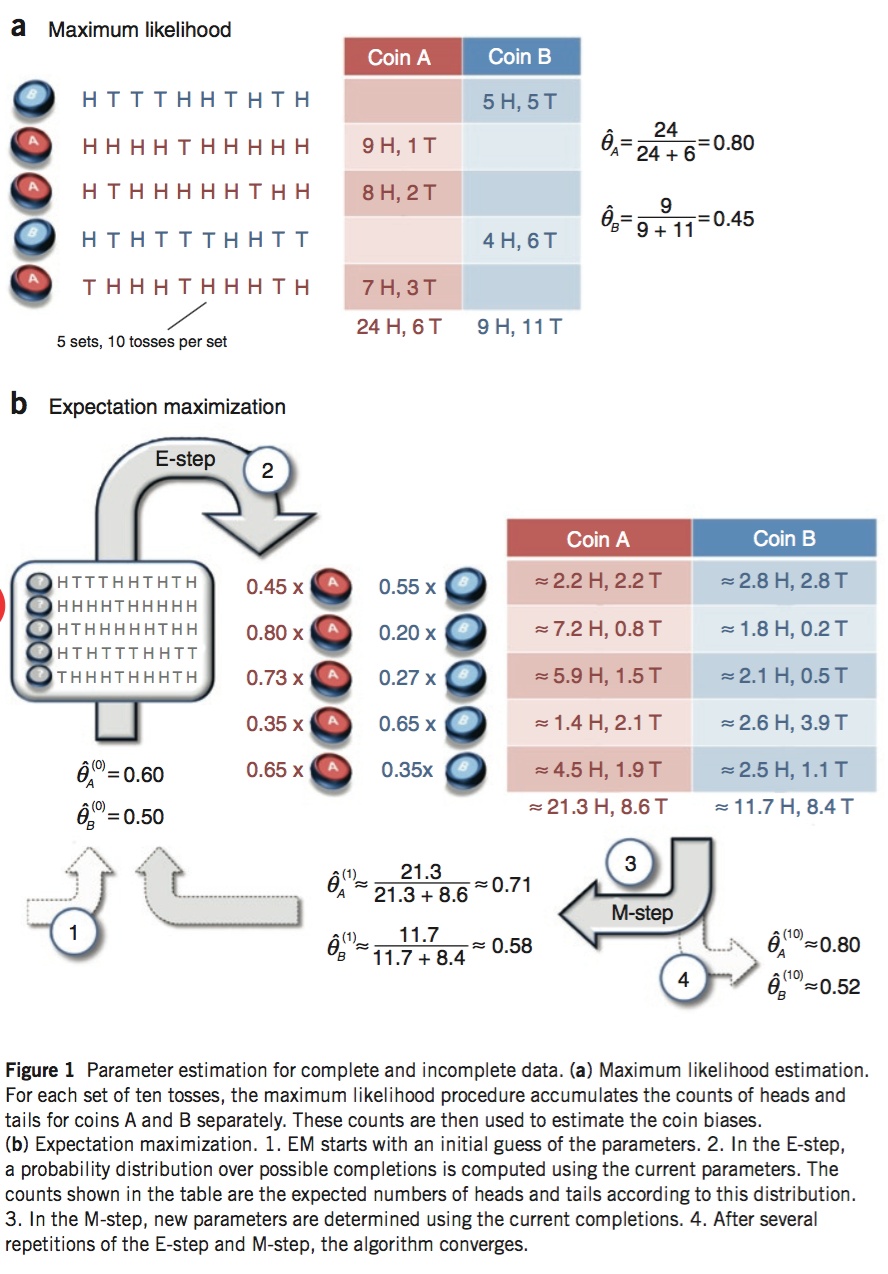
EM (expectation maximization) algorithm
EM is an iterative estimation of MLE when the data is incomplete or has missing (hidden) values. For the distribution parameter of data , the final task (MLE) is
The iterative process of EM includes two steps: E-step and M-step. In E-step, we maximize the likelihood with respect to the distribution of hidden variables and in M-step, we maximize it with respect to the parameter . Specifically, in E step, we find the optimal distribution of latent variable z with fixed , the update rule is
In M step, the update rule is
See the derivation and application (Mixtures of Gaussians) of EM algorithm in this doc. See this paper or the figure below from this paper for a simple example.
Jargon in ML
Linear classfier
Classfier is a blackbox to determine the label for the data. The blackbox of linear classfier is the innerproduct between data vector and some weight vectors: . And by adopt the kernel trick, all approaches for representing linear classfier can be converted into nonlinear algorithms (eg. PCA, SVM). It can be understood as the simple form of NN, too. Similarly, we can also define quadratic classfier.
Outliner
Anomaly. Data that fall far away its group or maybe wrong labeled.
Batch size
The number of data vectors for an update on parameters in NN. If batch size is one, we call it online learning. If batch size is more than 1, we call it batch learning.
Perceptron
It is for the "node" or "neuron" in NN. And sometimes, it specifically stands for single neuron NN with step function as activation functions which can be served as a binary classfier similar with logistic regression.
Evaluation method
Holdout
Divided the data into traning set and evaluation set from the beginning
Cross Validation
Devide data into k group. Use k-1 group to fit the model and use the left one to evaluate. Repeat the process k times.
Be careful of the three different phases of training, evaluation and test. They must come from different data. Training is used to adjust parameters in the learning model automatically, evaluation is used to adjust the hyperparameters in the learning model by hand and test is used for final benchmark. Never use your test data before you are confident with your model. Test process is not used for you to tune model. Otherwise, the model makes no sense.
Bias vs. variance
Bias: predict value vs. real value (could be understood as the accuracy for training data).
Variance: different prediction value in different realizations of model (in some sense the accuracy for validation data).
The tradeoff: the more complicated the fitting model is, the smaller bias and the larger variance it becomes (over-fitting). See this on the comparison and thoughts on these two terms.
Exploitation vs. exploration
Here is a cool explanation. Exploitation: learn one thing better (try to figure out what is the exactly average value). Exploration: learn something more (try to reduce the variance around). Scuh trade-off is common in recommendation system. - greedy is an algorithm to find the optimal position between exploitation and exploration.
Prudent vs. greedy
The trade-off betwenn interest in near and far future (locally vs global rewards). A prudent algorithm is always welcome. However, in most cases, prudent consideration lead to NP hard algorithms. Therefore, we have to take greedy algorithm in many cases and hope finding local optimal settings step by step is not too far away from the true global minimum or maximum.
Ensemble learning
Definition: Train lots of similar model from sampling of the data, and let them vote for the right predictions.
For example, the so-called bagging method is to smaple the data with replacement for N times to make N fitting models for voting. Random forest is a typical application of bagging.
And if for the prediction, we don't use vote (the mode of predictions), instead train another model (usually logistic regression) with input as the output of the set of models and the output final prediction, such structure of ensemble learning is called stacking.
And if we train weak learners stage-wisely, this is boosting. There are various ways to improve weak learners step by step, for example, gradient boosting, and especially GBDT (gradient boosting decision tree). GBDT is only useful for regression trees where gradient is meaningful. The prediction made by the GBDT is the sum of all predictions from the series of weak learners. Each tree is generate to bridge the gap between the real value and prediction from the sum of all trees before. See this post for a detailed explanation.
Another famous type of boosting method is Adaboost. This method assign a larger weight on the mislabeled data in the last round to train a new weak learner. At the same time, we give each weaker learner a weight for the final vote according to its accuracy. See this post for more info.
Different types of boosting approach can be explained in the same framework of addition model with forward stagewise algorithm, the differences come from the different choices of the loss function.
Generative vs. Discriminative model
Naively, one can agure that generative model are designed for create task, like image generation; while discriminative model is designed for recognition task, like image recongnition. Such understanding is too simple to be correct.
Suppose the data is and the label is . Discriminative model learns directly to make a predict on the label of newcoming data. Moreover, discriminative model can learn a hard boundary of categories rather than probability. Instead, generative model learns the join distribution and use Bayes inference to make prediction (generative model can still work in classfication questions!). What is the advantage for learning the joint distribution? Instead of predicting , you can use it to generate data from by sampling. For more comparison on these two concepts, see this question and this blog post.
Supervised vs. Unsupervised learning
Denpend on whether the data has labels. If there are labels for part of data, we call it SSL (semi-supervised learning). Actually, various conventinal supervised learning model can also be used in unsupervised learning scenario as long as one can come up with some smart ideas and designs.
For example, so called confusion shceme is widely applied in physics study to determine the phase boundary (critical value). At the beginning, phase boundary location is in the supervised filed, training data should be with phase label. However, we can use different fake phase boundary to train the model and find the true boundary by require the maximum accuracy.
Besides, there are also approaches named after semi-supervised learning, there is a seperate section for this topic.
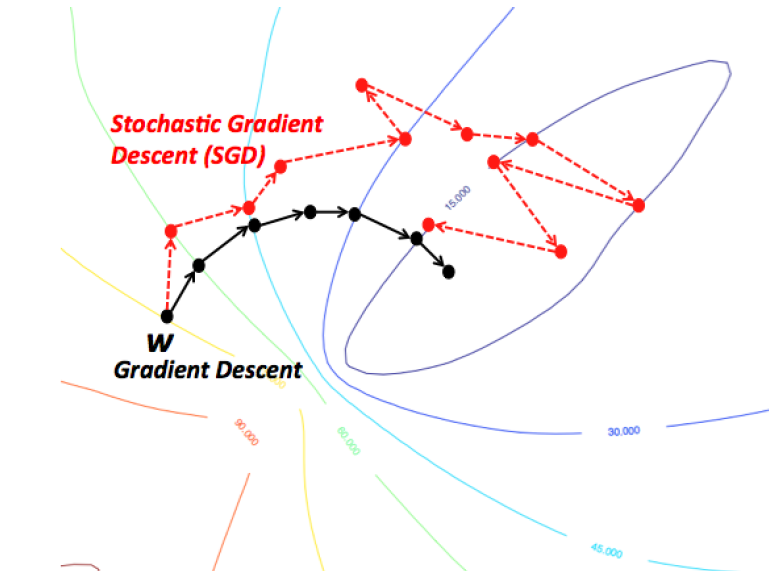
Gradient descent
Basically, one search for the extremum position of the function using the iterative process
In machine learning, the function f is the loss function of the model. We try to search the minimum of the loss function utilizing such gradient descent method. Generally speaking, the loss function is the sum or expectation value across all data samples. It is time consuming if we update the parameters based on the original version of gradient descent. Therefore, everytime we only calculate a small fraction of the data, and derive the loss function. This is so called SGD (Stochastic Gradient Descent) approach. SGD is not only fast in implementation but also helpful avoiding local minimum.
There are also various advanced optimizer to optimize loss function, such as adam (frequently used in NN training practice). For the improvements of all kinds of optimizers compared to SGD, see this brief summary.
NNN (Non-Neural-Network) approaches
KNN (K-Nearest Neighbor)
KNN is supervised algorithm. The aim is to give the label of new input data based on original input data. The principle is to find the k neighbors of labeled data, and determine the label of the new one. For comparison between KNN and k-means, see this post.
k-Means Clustering
The aim is to partition N data vectors into k-groups. The aim function is the sum of intra group variance:
This is an NP hard problem. There is an algorithm utilizing the iterative process to do the classfication, but no guarantee for optimal solution. Specifically, the algorithm is the following:
Assignment step: Assign each observation to the cluster whose mean has the least squared Euclidean distance, this is intuitively the "nearest" mean.
Update step: Calculate the new means to be the centroids of the observations in the new clusters.
The initial center of clusters can be chosed based on so called k-means++ algorithm. The philosophy behind k-Means clustering is EM algorithm, see this blog for the analysis on this connection.
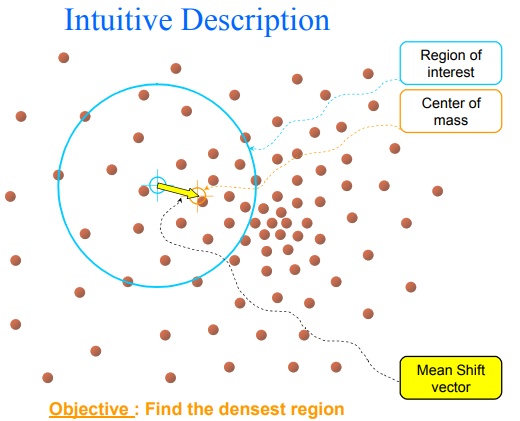
Mean Shift
Algorithm to locate the most dense part of dataset in the feature space. The basic idea is quite straightforward. Just find some point in feature space and then calcualte the weight center within some sphere centered by the start point. Then, iteratively move to the new center and repeat the calculation. Until we come to some fixed point and this is the most dense part in the space.
Spectral Clustering
Define a graph with no self-edges. The wieght of edge is a measure of similarity. Therefore, we have the weight matrix of such graph. The goal is to divided the graph into pieces without cutting too much edges. A typical goal is called sparsity:
where is defined as the function for number of vertices. The denominator penalizes the imbalance cuts. We define the cut as indicator vector (n is the number of vortice in graph G):
One can show the function can be expressed as
where is defined as the Laplacian matrix for graph G
The problem is NP hard unless we relax the restiction on vector to . By doing this we can construct our optimal aim as Rayleigh ration of matrix . Since the samllest eigenvalue is 0 for , the meaningful solution is the eigenvector of the second smallest eigenvalue (orthogonal to the first eigenvector means that the graph cut is an equally bisect), which is denoted as Fiedler vector. After we get the Fiedler vector, we use certain algorithm to make such vector mapping to . (Usually choose a critical value leading min-sparsity for the mapping.)
Alternatively one can get the first eigenvectors , and transpose these vectors to carry out k-means clustering to find the cut.
For more details and derivations, see this lecture.
Naive Bayes Classifier
Just a simple application of Bayes inference: . Naive means that each feature B is statistical independet on each other. And AODE classfier (averaged one-dependence estimators) is Bayes classifier without the naive indepedent assumptions. The famous formular can also be summarized as
Empirical Bayes vs. full Bayes: the former estimates the prior from data while the latter using some fixed distribution for prior from the beginning. See different inference schemes in this post. Using Bayes inference, you can derive the distribution of the posterior which contains more info than simply MAP estimation.
LDA (Linear Discriminant Analysis)
Alias: Fisher's linear discriminant. (Especially for two classes problem)
LDA is supervised learning whose aim is to find the optimal linear classifier for labeled high dimension data.
Suppose we have set of data vector labeled in k classes. Mean value and covariance matrix is and respectively. Then the variance intra-class are . The variance inter-classes are , where . We use the ratio between variance inter and intra classes as the effectiveness of the classfication. To maximize this ratio, by utilizing the Larangian factor, we have the conclusion for LDA transform vector (the eigenvalue correspoding to the ratio ):
It is worth noting that LDA is actually a generative model instead of discirminative one. LDA assume the likelihood as Gaussian distribution with different mean vector but the same variance, and we can then max the posterior probability to get the coefficients. Such approach based on Bayes inference can be generalized as Gaussian discriminant analysis, where we assusme data of each class can be summarized as Gaussian distributions. And we use MAP as follows to determine the class of data.
See this tutorial for details on GDA and Q(uadratic)DA. And if we use GDA framework to calculate the posterior probability, we are about to get the logistic functions.
PCA (Principle Components Analysis)
PCA is similar with LDA, but data are without label. Therefore, PCA is unsupervised learning. At the begining, there is only one group of data. The aim of us is to use some project transform vector and make the variance largest after the projection. The calculation is similar with LDA case, and the final eigen solution is
Again, the larger the , the more effective of the dimension reduction axis.
Note that itself can be recognised as proportional to the empirical sample covariance matrix of the dataset X (which is the dataset with zero empirical mean each column). The structure of data set matrix X: each of the rows represents a different repetition of the experiment, and each of the columns gives a particular kind of feature.
Or just get the principal values and vectors via SVD. as eigenvalues for covariance matrix of is actually equivalent to the squre of SVD value for . In other words, SVD and PCA are the same thing (see the explanation if you are confused with the equivalence).
Kernel PCA
Map original data point to in higher dimension, we only need to define the kernel function of inner product for further calculation. Because we are never working directly in the higher dimension feature space, the kernel-formulation of PCA is restricted in that it computes not the principal components themselves, but the projections of our data onto those components. Namely
There are still some subtle issues left, see the slides or blog for details. In this way, by choosing appropriate kernel functions, PCA can handle non-linear knowledge and seperation in the data. Such kernel trick can be genralized to nearly all ML methods for linear classifier and make them more capable on dataset with non-linear nature.
ICA (Independent Component Analysis)
For comparision between ICA and PCA, see this answer. The idea is somewhat similar to PCA. The difference is the critirion for basis choice: maximize the standard deviation or non-Gaussianity.
NMF (Non-negative Matrix Factorization)
It somewhat is similar to the ideas for truncated SVD but with only two matrix with non-negative elements. The factorization is not unique and there are many iterative alogrithm to find such factor matrix.
CCA (Canonical Correlation Analysis)
The way to find the two linear combination of two random variable vector respectively to maxmize the covariance of the two inner products (the most correlation direction). See wiki for derivation details or blog for example applications and kernel extensions.
SVM (Support Vector Machine)
Basically, it is to find an optimal hyperplane to seperate data, which is also one type of linear classfier with supervised learning. The aim of the separation is based on the evaluation of distance to the hyperplane from nearest data point, specifically we need to minimize subject to for , where is the label of the data . The application of SVM require the data can be linearly separated. If not, either kernel trick or soft margin target can be applied. See integrated blog for more info on SVM (kernel trick and the formula derivation of optimal problem are included). For the difference between LDA and SVM, see this question.
Decision Trees
Decison trees is a tree with nodes as the features condition while final leaves as the classfication. It is supervised. Classification tree predicts discrete classes while regression tree predicts real numbers. CART is the short for classification and regression trees.
To generate such a tree with least nodes and smallest path, usually we generate nodes from top to bottom, and keep some index the extrem value through the constructing of the node. Namely, from the top, we pick the features of the node based on some value evaluation dependent on features. Such value evaluation includes information gain , gini coefficient gain and variance reduction in continuum case (ie. regression trees). For information gain, I have give the formula before. For gini coefficient, the value is defined as .
For basic introduction on decision trees algorithm, see here. For the difference between different algorithms in decision trees (ID3, C4.5, CART), see here. The main difference is the index (information gain or its ratio or gini coefficients) and whether they can deal with continuum features (namely regression trees).
To avoid overfitting which is common in decision tree generation, we need some algorithms on pre-pruning and post-pruning. Besides, early stopping and return posterior probablity instead of categories in leaves might also be helful.
Random Forest
Lots of trees (bagging method) make the forest. To generate each tree, we need data samples from all the data (dataset N and features M). We sample with replacement N times of data and with features for each tree. No pruning process is needed for the forest. Use the mode of all the trees as the final prediction. Typically, the number of trees is of size 100 to 1000. One can use cross validation to find the optimal number of trees. It is interesting that instead of the mode, the variation of predictions amonst trees is also meaningful.
Regression
Regression analysis
The conventional fit scheme for output as continuous variable, eg. linear regression. The loss function is the ordinary least square.
To avoid overfitting and to get a more stable solution for fitting parameters , we introduce the below methods.
Ridge regression
Add regularization term into the loss function. Only responsible for shrinking the value of fitting parameters.
Lasso regression
Add regularization term into the loss function. Tend to reduce the number of freedom of parameters.
Of course, we have to tune hyperparamter before regularization term to optimize the trade off between bias and variance.
Logistic regression
The fit scheme for output as two seperate values (0,1). So called logistic function: . Fit the data with . Unlike linear regression, there is no formular for dependent on the data provided. We should find the optimal parameters by iterations to optimal the aim which can be viewed as the error or the likelyhood from different aspects. And actually, such regression can be viewed as a two layer NN with sigmoid activation function and one output.
Why the function is used to estimated the probability binary distribution? Try locate the boundary of the two classes via
We are back to the linear class boundary and this is consitent with LDA derivation.
Gaussian Process
Gaussian process is the Gaussian distribution on infinite number of random variables (variables in continuum limit), and once several variables are picked up, they follow the multivariate Gaussian distribution.
Suppose you now have data and , now you are given , and be asked what is the most possible value of . To make such a prediction, we usually first assume some form of the function , and use the given data to do a regression to fit the parameters of . And finally, the prediction is .
The basic idea of GPR (Gaussian Process for Regression) is instead assuming all the follow Gaussian process and hence follow Gaussian distributions. If we further assume some function form of the covariance matrix (kernel functions) for this Gaussian distribution (the mean vector is usually zero by assumption), we can utilize the condition distribution of multivariate Gaussian distribution to predict .
For tutorial on Gaussian process and its usage on regression and even more on classification and dimension reduction (GP-LVM), I strongly recommend this doc.
Manifold Learning
This family of approaches mainly focus on nonlinear dimension reduction. The belief is that data in higher dimension Euclidean space are actually lie in certain lower dimension manifolds within this space. Sometimes kernel PCA is though as manifold learning, too. The list of approaches in manifold learning is very long, see this doc. We only list several methods below. Note in practice manifold learning techniques are so finicky that they are rarely used for anything more than simple qualitative visualization of high-dimensional data. See this section for its drawbacks.
- Isomap
Use the distance matrix instead of position matrix for data. The distance is also not defined in Euclidean space but in abstract graphs. Using k-NN to link the edge of graph, and the distance is defined as the shortest distance (number of edges) between two nodes (data points). After we have the distance matrix of data, we use MDS (multidimension scaling) algorithm to carry out the dimension reduction (linear embedding). The philosophy of MDS is to project data into lower dimension and at the same time try to keep the distance between datapoints unchanged.
See this post for more info on isomap and MDS and this on details of MDS.
- Locally Linear Embedding
The basic idea: only keep distances unchanged between nearby points intead of all points in MDS.
- t-SNE (t-distributed stochastic neighbor embedding)
See the algorithm here. The distance between data points is measured by some probability with Gaussian weight of Euclidean distance. Then we use KL divergence of such distance probability distribution for data in high and low dimension to train the projection. From original SNE to the improved t-SNE algorithm, see here.
In summary, so called manifold learning is to grasp the distance between points in higher dimension. The Euclidean distance doesn't work well due to the curse of dimension, hence one have to find other local coordinates or something similar with the help of manifold conception.
Probability Graphical Models
See this answer for a general picture. This family of models are suitable for sequence manipulation in NLP.
- directed and undirected models
In undirected model, the node represents the random variable while the link between nodes represent some positive-definite potential function (in general some exponential function) depedent on these nodes (random variables). Therefore, undirected models give the joint probability distribution of all nodes by product of each link function. (see this post for details on maximal clique decomposition for undirected graph).
As for directed graphs, they are more like hierarchical probability model where each node represents a conditional probability, and the final probability is the product of all the nodes.
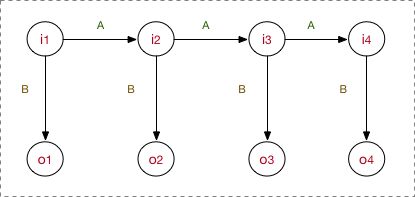
- HMM (Hidden Markov Model)
Markov chain with a latent variable. HMM is determined by the initial distribution of starting vector , the transfer matrix A and the observation matrix B.
Three basic problems in HMM: 1. train to learn A B (MLE with hidden states or Baum-Welch without hidden states); 2. find the hidden states series with the most possibility (Viterbi algorithm, I recommend this post); 3. Compute the probability of given sequence.
- MEMM (Maximum-entropy Markov Model)
It is discriminative model instead of generative model as HMM. It directly model the likelihood as
is functions we specify and the weight are parameters we have to train using optimizer as any classfier.
There are three types of problems as in HMM, too.
- CRF (Conditinal random field)
CRF is also discriminative model, we refer to linear chain CRF specifically. The probability formula for such classfier is
See an introduction by tagging example here.
To conclude the NNN approaches part, there are also various approaches closed to the ML field, like genetic algorithm (for its role in ML field, see this discussion), topic models in NLP, etc. We won't cover those methods in this note for now.
NN (neural network) family
Feed Forward Neural Network
- Why we need neural network?
Suppose we need to fit more complicated mapping with lots of parameters than cases in NNN approach, what is the efficient way to do this? This problem can be divided into two parts: structures of parameters to represent some map and efficient way to optimize these parameters. You may be able to name various approaches for how parameters can be organized to represent arbitrary mappings, however the second requirement restricts our imagination to very limit case. The one frequently used in CS field is so called neural networks. (Maybe tensor network in physics field is another possibility.)
- Structure of parameters
Take the simplest full connected FFNN as an example, see fig below.

The neurons are orginized as layers, and all the line arrows represent matrix multiplication. One can set as many hidden layers as he likes, though it may hard to train. From one layer to the next layer, we have
where x is the vector with length the same as the first layer (say n), b is the bias vector with the length the same as the second layer (say m), w is the matrix with size and f is called activation function which apply on the vector elementwise, i.e. . As long as you stack all layers together and do the calculation between every neighborhood layers as mentioned above, we are arriving at the basic NN.
The frequently used activation function includes sigmoid, tanh and RELU(Rectified Linear Unit). The only requirement of activation function is differentiable and non-linear. (suitable for back propagation and make multilayers meaningful)
| sigmoid | tanh | RELU | leaky RELU | softmax |
|---|---|---|---|---|
- How to train
Now we have done the algorithom of prediction part of neural network. Namely, when an input data is given to the NN, how can the model give the output vector(prediction). But the remaining problem is how to decide the parameters of the model, namely matrix w (weight in arrows) and bias vector b (bias in neurons). The answer is the training algorithm of the NN.
We use the philosophy of SGD to train and update all parameters in the model. The algorithm is so called back propagation. It is just SGD of the loss function. Loss function is the aim we want to optimize for the model. See table below for frquently used loss functions, I omit the sum of output neuron and the sum over data for simplicity. We call it propagation due to the fact that we need the help from chain rules of derivatives to carry out gradient descent and that's it. For detailed derivation and implementation on the basic back propagation approach, see this note. On training process, we train the model n epochs and in each epoch, we update parameters after each batch of data. Typical value for epochs is and for batch is .
| cross entropy | square loss | exponential loss | 0-1 loss |
|---|---|---|---|
But there are still some thing cannot be trained. For example, the number of layers, size of training batch and number of epochs, activation function for each layer and loss function. We call such things hyper parameters, they cannot simply determined by training but need to be fixed manually.
- Three stage of training model
A general workflow to train a NN model is divided in three stages. The data must be divided into three part accordingly, i.e. training data, evaluation data and test data.
Traning data is for usual back propagation training process and parameters updates. Evaluation data is used in evaluation process, where the accuracy is calculated though the evaluation data is not used to update parameters. What is the use of evaluation? It aims to guide the hyperparameters update. We can change our settings of the NN (hyperparameters) to make the accuracy in evaluation process higher. And for test data, it is the final examination of the model. If the accuracy is acceptable, then the model is ready to go. You are NEVER allowed to adjust your model (no matter parameters or hyper parameters) based on the test data. Testing is merely a final examination, it is CHEATING if you train the model with any hints from the test process. And it is also WRONG to evaluate your final model based on the evaluation data, since you have adjusted the model to satisfy them before (Frankly speaking, physicists usually get things wrong related to this paragraph, what they have done are mostly circular argument and make nonsense).
The training process is very difficult in complex cases and many method should be employed to avoid overfitting or gradient exposion, etc. The main solutions include dropout layer (extra layer similar in spirit to the Bagging procedure), regularization terms, early stopping, data enlarging, gradient clipping, batch normalization (attached extra layer to standalize input data in a mini-batch), etc. You may find this post interesting on some of the training tricks.
Once we have the training algorithm and the prediction algorithm, we can fit every function in the world as long as we have enough parameters. But if the number of parameters increases with the system size, the model is impossible to make sense in computers. Therefore, it is still impressive why NN learning so effective with so cheap settings and so smalll number of parameters. We will talk the effectiveness from physics perspective in the application sections.
- Summary on the ingredients of NN
Layers, connections, activation functions in each layer, loss functions, initialize of parameters, batches and epochs, optimizer, evaluation metrices, regularizer.
You often have to combine all possibility of the above ingredients together, and try again and again until some combinations of hyperparameters are satisfying. Machine learning, in some sense, is alchemy in modern times.
- Some simple NN-like models
And there are several simple NN-like model with shallow layers but a bit different from the full connected NN we mentioned above. For example, SOM networks (designed for clustering, see detailed series), ART networks (ref), Elman networks (origin of RNN) or RBF networks (just using a uncommon activation function in NN). For a quick overview of these networks and terminology, see the second half of this blog.
Among them, SOM (sel organizing maps) is of great interest and it is an example of compete learning. See comparison between SOM and k-means on clustering problem.
Convolutional Neural Network
CNN is designed for image recongnition with special connection structures and suitable for systems with input data in higher dimension. Since the size of input data of images is very large, we are about to have too much parameters in the NN if insisting on full connected NN. Therefore, CNN utilize local connectivity and weight sharing to sole the above issue on full connected NN. Part of the images of this and the following section come from this note.
The general layer structure of CNN:
The structure of convolution and pooling layer together can repeat for M times. The example CNN looks like the figure below.

Here, .
- Convolution layer
For image pixels, we label them as . To extract the feature maps from convolution, we use the formula
See the fig below to get a more clear idea. In this case, the window move one pixel each time, the stride is one.

The depth of the freture map (number of feature maps) equals the number of filters we used in this layer, the size of feature maps is related with stride and the size of original images.) See the figure below for a more complicated case, where we have some zero padding in the edge of images which is very helpful for recongnization of the edge feature of the image.

- Pooling layer
By pooling layer, we further extract and compress info from the feature maps to reduce parameters and complexity of the model. For example, max pooling is the approach to extract the maximum value of each separate window from feture map. See figure below.

The principle of training and predicting of the model and the rest part of the model is similar with FFNN (actually the derivation of back propagation in this case is a bit involved).
The most famous construction of CNN is LeNet-5, see figure below.

- Graph CNN (GCN)
Graph is one type of organization of big data, information is stored in the edges and nodes. In some sense one can develop CNN to distinguish graphs instead of images, which would extend the application of CNN broadly. It is still a very new and active field, see this post for a quick intro on GCN.
- deconvolution networks (DN)
The inverse of CNN which is designed to generate images. The better name for DN may be transpose convolution network. The start point to understand DN is to understand im2col, which view the convolution as a matrix multiplication (see this post). See this paper on convolution arithmetic and see this for animations of CN and DN calculation. Besides, here is an example of generating images from DN.
Recurrent Neural Network
- general idea
RNN is designed for NLP (natural language processing) related tasks. A sentence may contain different number of words, but all the NN model we construct before only take fixed length input. To resolve this issue, we come to the construction of RNN. The basic structure is shown in the figure below.

Each circle is a NN itself (all circles are the same NN in the sense that they share the same parameters), is part of the input (the word or character) or all the can be viewed as the input (the sentence) and is the output (say prediction of next word) or the last can be viewed as single output (for sentence classfication). What makes the circle different for each input is the hidden states instead of the parameters. The forward prediction formula is
So the output is dependent on all the previous implicitly. And the state of neuron is kept for the next input .
If the circle is a deep NN, one can set hidden variables in neurons in each layer.
- Bi-directional RNN
Just two separate RNN, with different time direction, the two networks don't share the weight parameters. And the outpust is just the sum of the two output from the two RNN. Bi-directional RNN is designed for word completion in the middle of the sentence instead of predicting the next word.
The training algorithm for RNN is so called BPTT (backpropagation through time) which shares the same philosophy as back propagation. See detailed derivation here. As for practice on traning RNN, there are various subtle issues (stateful RNN, batch size vs sequence length, padding vs mask, embeding, etc.), which I won't mention in this note.
RNN is very deep NN in the time direction, so it is faced with serious gradient exposion or gradient vanishing problem. For gradient explosion, you are going to meet NAN in the training and it is easier to handle (set the cutoff). However it is more subtle to deal with gradient vanishing problem. It is difficult to find the problem at the first place. To solve this problem, one tend to use RELU activation function or use the LSTM model, the substitute for the traditional RNN with similar structure.
- Input and output structures
By manipulating the structure of RNN and utilizing different perspectives on input and output, we can construct RNN type networks for different tasks.
text auto generation (one to many)
Just treat each as the prediction of the next word and also use as the input of the next time. Therefore, by simply assign one word, we can generate the whole paragraph. To see how effectiveness of such text generation, see this fantastic post for some interesting examples.
video frame classification or prediction (many(N) to many(N))
Still vanilla RNN structure, but treat each as the label of input frame .
sentence classification (many to one)
Say we want to classify the sentiment of one sentence, whether it is happy or angry. We use all as the input words from the sentence and use the final as the classification output.
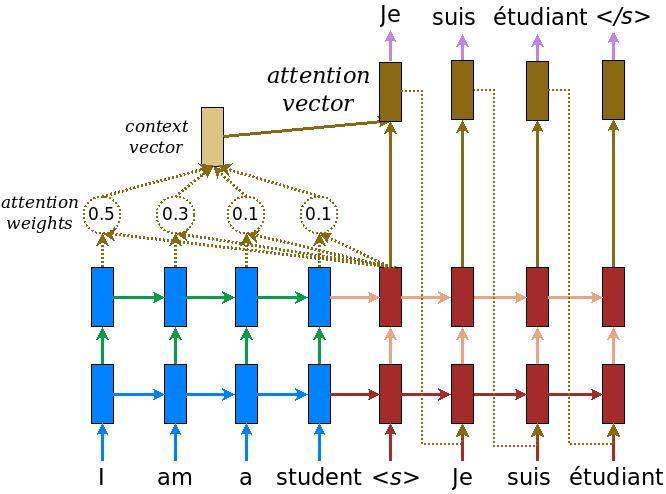
seq2seq for translation (many(N) to many(M))

The input x is in one language and the output y is in the other language. The same meaning isn't necessary to have the same length of word in different languages. The final hidden states of the input series RNN (encoder) will be transported to the output RNN series (decoder). For more on seq2seq, see this.
We can further introduce attention mechanism in seq2seq model. The rough idea is the input of decoder is not only the final output of encoder but also all original inputs through some transformation. The example structure is shown below. The context vector calculated from the input series together with the output of decoder give the final output (with an activation function). See this post for details and see this and this for more variants on attention mechanism in NN.
- LSTM (long short term memory networks)
LSTM is a variant of vanilla RNN, the inner structure between them are somewhat different, but the APIs are all the same with RNN. So when people talk about RNN, all statements and applications also works in LSTM. It is designed to solve the gradient vanishing problem for deep RNN.
The basic philosophy of LSTM is to keep two hidden states intead one in RNN, one for long time and the other one for shrot time memory.

For the detail gate structure and update protocol in the network, see figure below. For details of forward prediction and back propagation traning algrithom, see this note or this post.

- GRU (Gated recurrent units) and Other variants
Since the inner structure of LSTM is complicated, as long as we change something there, we would have a bunch of variants of LSTM. The most famous one is GRU, which reduce the number of gates and cell states and improve the training speed. See this post for all kinds of variants of vanilla LSTM.

- Recursive Neural Network
This type of NN has noting to do with recurrent neural network. But it is also abbreviated as RNN and suitable for NLP (syntax tree parser), so I list this item here. For details, see this note.
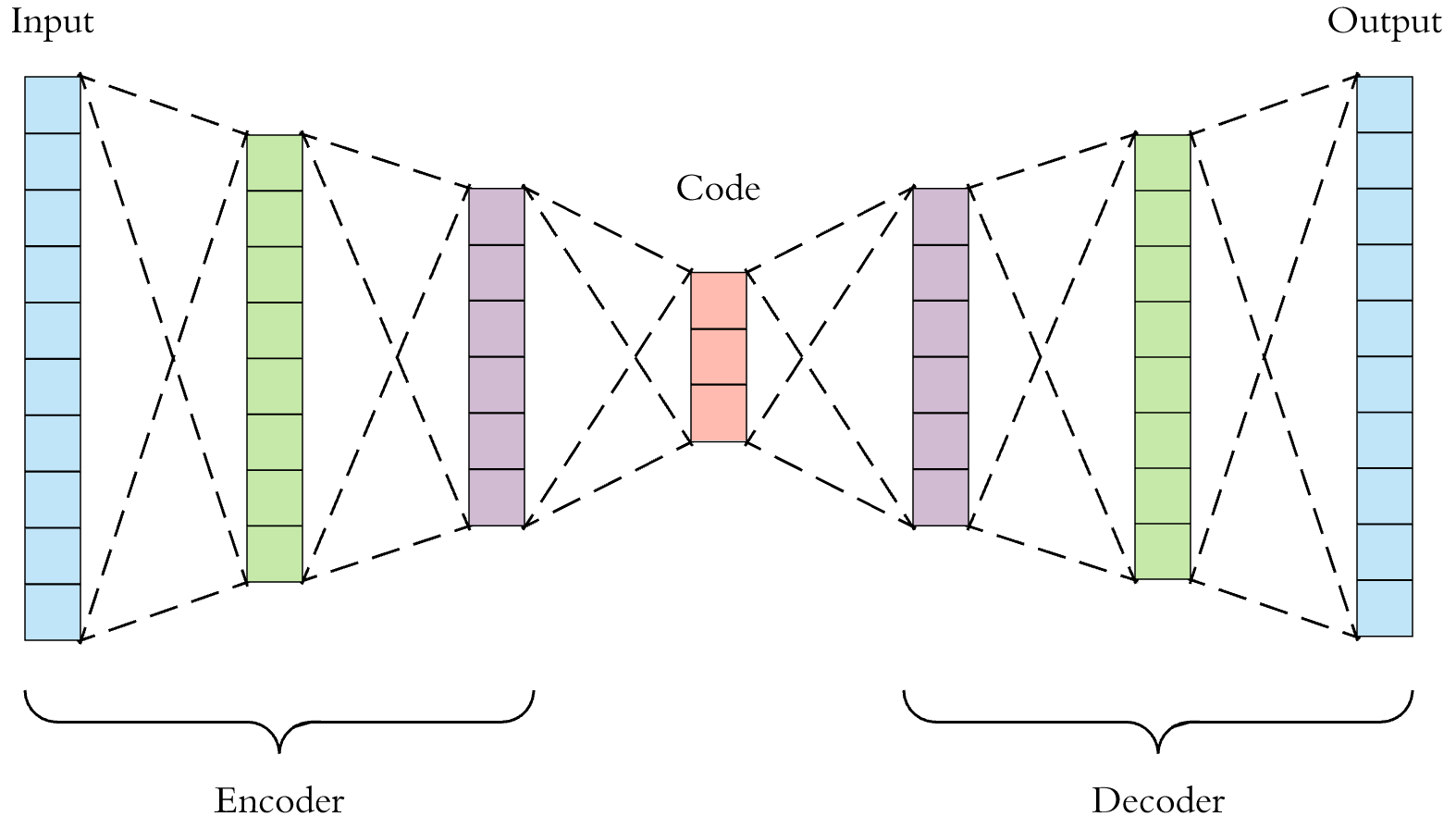
Autoencoder
- Vanilla AE
Nothing special, just a conventional NN (FFNN or CNN) with bottleneck structure. By make the loss function as the difference between input and output data, we achieve unsupervised learning via NN. And from the latent layer, we can extract lower dimension representation of input. The encoder part behaves like information compress and the decoder part is responsible for recovering the input from the latent space representations.
- Denoising AE (DAE)
Add noise to the input data for training. But the loss function still refers to the original input (maybe an extra regularization term in loss function). Such design makes the model more robust in extracting real features of input.
- Sparse AE (SAE)
Just the inverse of AE. AE is with the hourglass shape while SAE is with football shape. To avoid the trivial latent space distribution, one definitely have to add more constraints in this model. The penalty term we add into the loss function is
where is the dimension of latent space and represents Bernoulli random variable with mean value . Practically, we fix a small , and by this term, we make the neurons in latent layer more inactive (the value of neuron is close to 0 instead of 1).
For more on SAE, see this lecture (from page 13).
- Variational autoencoder (VAE)
The structure of VAE is similar as AE (the difference lies in loss function where a new regularization term sets in), but it has nothing to do with AE. Instead, VAE has a strong background from statistics inference. By using Gaussian sampling in the latent layer, the model is more capable to generate image or grasp lower dimension representations compared to AE. The key objective formula is
and corresponds decoder and encoder in NN structure. For everything about VAE, just see my blog and references therein.
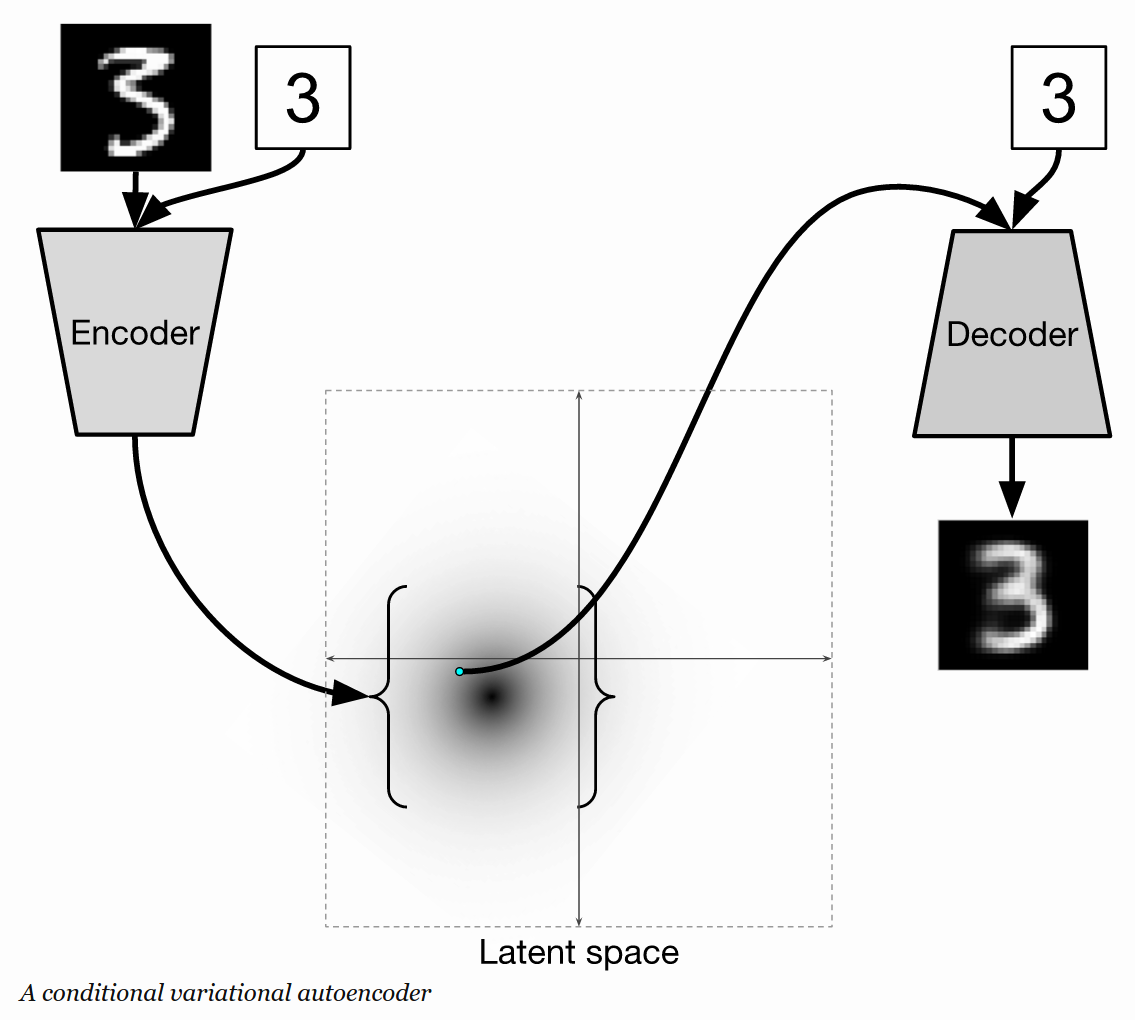
- CVAE (Conditional VAE)
It is in supervised learning fashion different from all other types of AEs. By make the label as the input of both encoder and decoder part, we can generate image more distinct. This change is equivalent to make all distribution in VAE under a new condition. See this post for explanations.
Boltzmann Machine
- Hopfield network
Complete undirected graph with the node as binary neuron (can take value ) and weight on edges as . Update rule for neuron in this network:
The neuron update can be asynchronous or sync (dangerous though).
All the models in this section have energy based explanation and classical spin system analogy so it is friendly for physicists to study. Energy for Hopfield network is
The above update rules for the model lead to the minimum (maybe local though) in this energy. But this model is of limited usage; the original aim of this model is to imitate the behavior of human memory: training weight for a configuration (remember) and recover the configuration based on minimizing the energy (recall).
- Boltzmann machine
The units (neurons) of Boltzmann machine are stochastic (finite temperature) compare to Hopfield network (zero temperature). The energy form is the same as Hopfield network (but we usually use 1 and 0 for neuron states of BM and following RBM). But since we are at finite temperature this time, the aim is not to minimize the energy (this time the probability of some state is proportional to the Boltzman weight). By simple derivation, we have
The training of BM seems to take exponential long time. So we stop here and trun our attention to RBM. Many aspects we talked below also apply to BM case.
- Restricted Boltzmann machine (RBM)
Divide all neuron in BM into two layers (visible layer and hidden layer), and set the link weight within the layer to zero.

The probability of a state is just
To grasp the spirit of this stochastic model, we label each neuron by its probabilty to activate (i.e. instead of 0). Therefore, we have the following relation
where is the sigmoid function (we meet sigmoid again and again).
Now let's see how to train such a model with unlabeled input dataset V. The aim is to minimize or .
We can show that gradient of the above aim lead to the result as
The first term is the expectation value across the training data: and the second term is the expectation value across samples from the model which is hard to calculate. Using a Markov chain to update the neuron by layers iteratively until thermal equilibrium, and then we can calculate the expectation value. This is so-called MCMC (Markov chain Monte Carlo) method. To make the calculation more fast, we further introduce CD-k (contrastive divergence) algorithm. It is simply use the result from the first k updates.
See details on the training algorithm in this doc. See practical guide on training details of RBM by Hinton.
RBM falls into unsupervised learning category with possible usage in transforming input data instead classify it. It is also a generative model as it can model the joint distribution which could potentially generate similar things as input dataset.
- Continuous RBM
All the models in this section above is on the binary discrete data. If one can adjust all real value data into the unit range, the original version of RBM may still works in a sense. Other solutions including Gaussian RBM and continous RBM, see this answer for solutions of RBM when input data is real valued. See part 3 of this paper for the two simple extensions for continous inputs. And specifically, see section 2.2 of [this review] for a detail description of Gaussian RBM (continuos input with binary output, one can also generalize it to Gaussian-Gaussian RBM, though it is harder to train). For more involved setup, and the relation between RBM extension and diffusion networks, see this paper.
- Convolutional RBM
Adding the convolution feature but keeping the probability interpretation of RBM at the same time. See this thesis and the original paper.
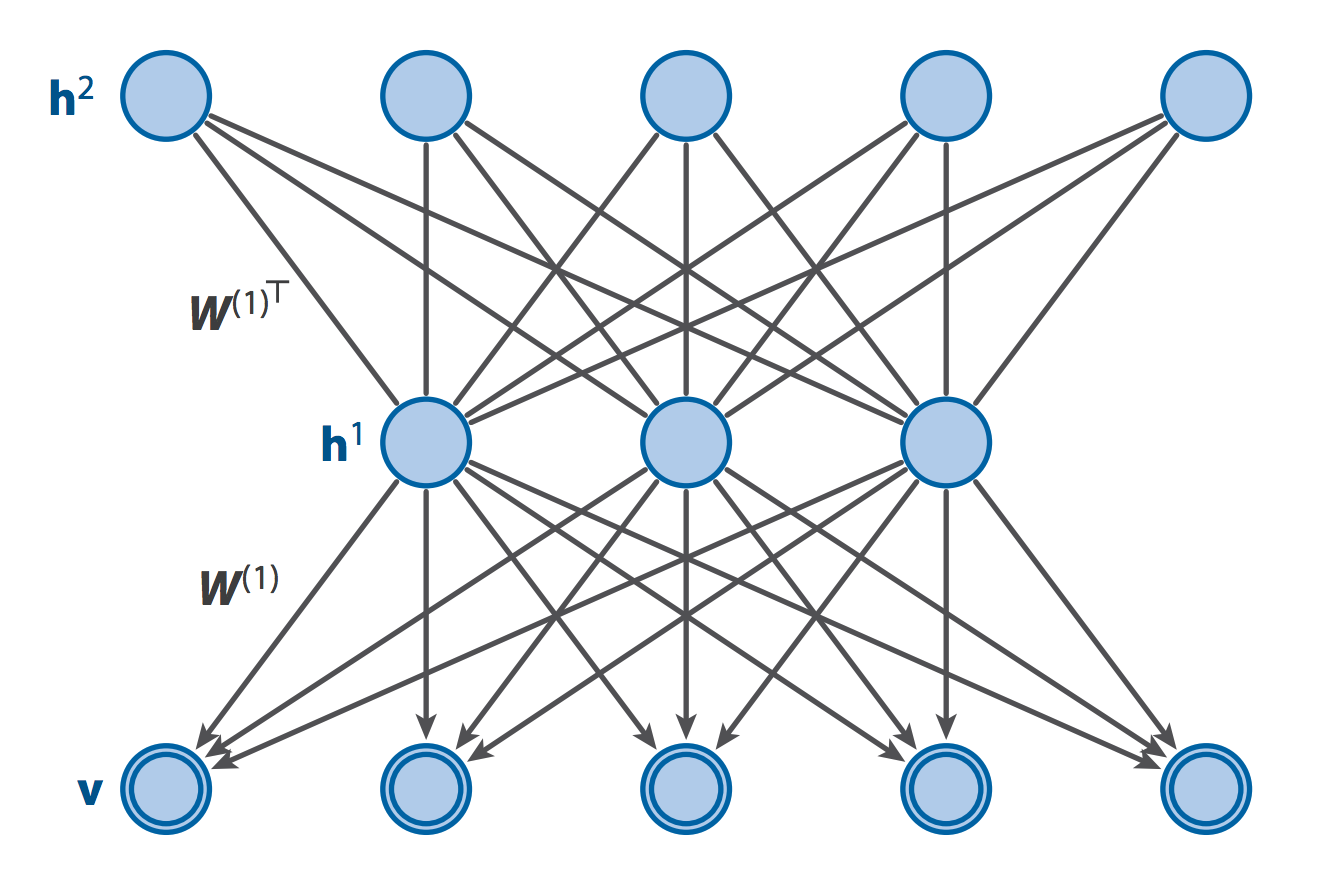
- Deep Boltzmann machine
DBM is energy-based model as RBM, but with Ising coupling between each neighbor layers. So the probability distribution the model give for visible freedom is
we take a three layer DBM for demo, of course one can add bias term in the energy, too.
The condition probability between layers then are still given by sigmoid function but with coupling from two sides (except for the two layers in the boundary). Then one find the odd layers and even layers are in a sense decoupled (similar role as the visible and hidden layers in vanilla RBM), so the Gibbs sampling process in DBM is to update the configuration for odd and even layers iteratively.
As for the training, pretraing the model as stack RBM is helpful for fast convergence (share the same philosophy of pretraining with the model below: DBN).
- Deep belief network (DBN)
Stack several RBM together as a very deep NN. Pretrain RBM layer by layer (since RBM is unsupervised learning model). It is a good generative model itself and we could also put a final classify layer on the top for output and train the data in supervised fashion by fine-tuning parameters through back propagation. Such supervised learning practice also works well in semi-supervised settings. Actually DBN is the birth of deep architecture for this wave of deep learning.
Especially be careful about the differences between DBN and DBM. The probability for a three layer deep belief network is described by
In the language of probability graphic model, the deep belief network is organized as following: the deepest two layers make a undirected graph while the following layers including visible layers are directed graph (the probability is given by the product of conditional probability). In other words, except the top layers are RBM, all the following layers are sigmoid belief network (belief net is just the sparse directed graphic model). The whole model of DBN is NOT an energy based model. The key observation here is the fact that if we set , the joint probabiliy of is the same as the bare RBM for the two layers.
By training RBM layerwise, everytime one proceed to a new layer, the new weight matrix can initialized as the transpose of the weight matrix in the last layer. As for the sampling process from DBN, one first run Gibbs sampling for the top two layers as usual RBM. Then one can go forward as a sigmoid belief network to generate stochastic visible samples.
See this review for a detailed description and somewhat rigorous proof of common deep structures for RBM family (DBN and DBM).
- deep restricted Boltzmann networks
Stack several RBMs with conditional probabilities between neighbor layers the same as RBM (unidirection, instead of bidirection in DBM). The Gibbs sampling in this model is down to up to down loop updates. See the paper for details.
The key to distinguish all the deep generalization of RBM is see the condition probabilities: forward sigmoid (DBN); sigmoid from layers on both two sides (DBM); sigmoid from layers on either two sides (DRBN). In other words, the intrinsic differences between these models are the definition of joint probabilities: after all, these models are all probability graphical models. For the general picture from probability models to RBM, see my blog. The joint probability of DBM is defined by statistical weight from energy, which is typical of a undirected graph. On the other hand, the joint probability of DBN is defined as a top layer RBM distribution producting sequential condition probabilities in sigmoid form. The logic to understand DBN is: the starting point of DBN is the definition of this joint probability distribution while the layerwise training is a natural result of the probability definition (one can show the training is consistent with the definition by constructing infinite sigmoid belief netwrok and consider so called complementary priors, see original paper by Hinton). The joint distribution of DRBN is involved though it can be taken as an undirected graph (as far as I know, there is no work giving such joint probability).
Or one can distinguish them by generator behavior: Gibbs sampling within top layers and forward sigmoid to the end (DBN); alternating update visible and hidden layers (RBM); alternating update between even and odd layers (DBM); layerwise up-down loop update (DRBN).
As for unsupervised training algorithm: DBN is trained layer wise as RBM. DBM and DRBN is trained as RBM as a whole. Model average is achieved by CD-k (DBM is updated alternating odd and even layer, while DRBN is updated with down-up-down sequence layerwise.) Data average is also achieved by MCMC (more involved than ordinary RBM): fixed visible layer to run the Gibbs sampling alternatively for odd and even layers until equilibrium (DBM); from visible layer update layerwise to the top layer (DRBN).
To summarize in a higher level, the implementation of directed and undirected graph models in the language of NN are sigmoid belief net and restricted Boltzmann machines respectively. For sigmoid belief net, people invent so called wake-sleep algorithm (train two set of weights respectively in the two phases) by the ansatz the (wrong) posterior distribution of latent variables are independent. This algorithm has lots of drawbacks including mode-averaging. Suprisingly, when people study stacked RBM, they find the so called deep belief net model is just the same with sigmoid belief net except the top RBM structure (hybrid model). One could further improve the accuracy of DBN by a fine-tuning with a variation of wake-sleep algorithm globally.
More Generative Networks
- Generative adversarial networks (GAN)
One neural network, called the generator, generates new data instances, while the other, the discriminator, evaluates them for authenticity; i.e. the discriminator decides whether each instance of data it reviews belongs to the actual training dataset or not. The discriminator is a usual CNN with sigmoid output for whether the input is fake or not. The generator is an inverse convolutional network, takes a vector of random noise and upsamples it to an image. The loss function is
where is the noise input prior.

Comparison to VAE in generating image: while GANs generate data in fine, granular detail, images generated by VAEs tend to be more blurred. See reference list in this page for more resource on GAN and this list on variants of GAN. And see this detailed tutorial by Goodfellow. Finally note that GAN is infamous for difficulty of trainning and it may also be hungry for hardwares.
- Normalizing flows
The basic formula for probability density under transformation of random variables is
We usually call the implementation of a bijector. If we stack multiple bijectors, we are arriving at so called normalizing flows. If the bijector has tunable parameters, such normalizing flow structure is similar with NN. Idealy, we can also optimize the model to maximize the probability of data.
See this post on normalizing flow, and this post for its modern development with the help of autoregressive model.
- Real NVP (real-valued non volume preserving)
See arXiv: 1605.08803. Here we introduce an efficient way to realize the bijector. What features are required for designing bijectors? Easy to inverse, easy to compute the Jacobian, to name a few. The model is based on the observation that the determinant of a triangular matrix can be efficiently computed as the product of its diagonal terms. The forward rule and inverse rule for :
and the determinant is which doesn't depnedent on the function , so we can feel free to use deep NN to represent the two functions and nothing get complicated when calculating the derterminat. Therefore, we have both the flexibility in expressing while keep the training calculation simple at the same time.
- Autoregressive models
Assume , and all condition probability is governed by some Gaussian distribution whose mean and variance can be calculated by NN with inputs . Though it seems the assumption denpends on the ordering of data exists, the model works pretty well in generating images. Actually if you consider the different order of data, you can come up with ensemble learning for this case. The general structure of the model and the sampling process are shown as below (masked autoregressive flow).

There is also inverse autoregressive flow (IAF), the only change is the NN for mean and variance of now dependent on instead of . MAF is quick for train while IAF is quick for sampling. See this doc for more on MAF. Parallel wavenet is proposed by Deepmind combining MAF and IAF, so that the model is quick in both training and generating processes. Such probability density distillation approach (MAF as the teacher and IAF as the student) parallels GAN in some sense. See the original paper for technical details (Part 4 especially).
A concluding remark of this NN section: there are still various types of NN we don't mention in this note, if you are interested in wandering in the NN zoo, refer this (definitely it is also not a complete list).
Advanced ML approaches
Active Learning
Components of active learning : C is the classifier trained for labeled data L, U is unlabeled data and Q is the query algorithm to pick most uninformative unlabeled data. Such data should be labeled by "expert" S then. Firstly, one have some data in L. Then one can train a C based on L. Then we use Q strategy to pick some data from U and label them via S. Next, retraining the model C based on new enlarged L. Repeat these steps until the C classifier is satisfying.
The core of such algorithm is the strategy of . One can query by uncertainty, by expected change, by error reduction, by information entropy, by trade-off between exploration and exploitation and so on. Therefore, active learning is a framework with algorithm and implementation dependent on specific problems. The classifier C can be any learner we know before in ML.
For an detailed introduction to active learning, see this.
Semisupervised Learning
Pure semisupervised learning: unlabeled data for training is not the data for predicting.
Transductive learning: unlabeled data is both for training and predicting.
There are various algorithm developed for semisupervised learning. See this chapter for an overview of SSL.
- Generative models
Deal with data and missing label using EM algorithm. The optimal aim (by tuning parameters ) is (the first part is data with label)
- Label propagation
Yet another algorithm based on graph structure. The basic assumption is the label can propagate through link in some weight of probability (). The iterative let the label propagation until convergence.
See this post for the algorithm and python implementation.
- Modified k-means
Constrained version of k-means clustering: Treat the labeled data as must link or cannot link in the graph. Then carry out the k-means clustering under these restrictions.
Seed version of k-means clustering: Just use the mean value of labeled data points for each class as initial center of class.
- S3VM
Semisupervised version of SVM. The basic idea is assign all data with a class by a pretrained SVM on labeled data and then add relevant regularization terms to iteratively find optimal hyperplanes. The frequently used regularization terms are hat loss and class balance restrict ( terms below):
See this for the introduction to the algorithm.
- Co-training
Suppose the data , we use the two independent feature sets to train two classifiers . Then we use the two classfiers to pick the most confident points from unlabeled set and repeat this process until the unlabeled set is empty. If one use only one classfier, we are arriving at so called self-training. If one use multiple learner, we have co-forest.
Reinforce Learning
- Settings
Agents and its actions A guided by policy, environment and states S, rewards and transition rate under action a . The whole settings is discrete in time steps. The goal for agent is to collect as much rewards as possible.
- Value functions and discounting factor
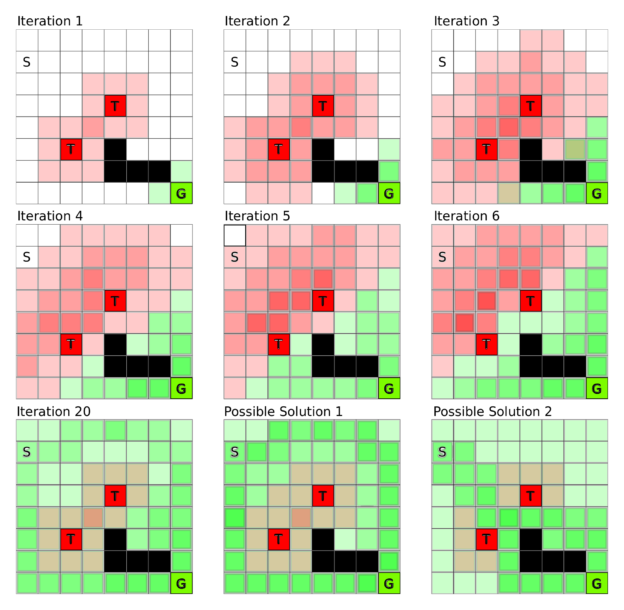
Assign the reward for each possible state. One can obtain value functions by iterative process until equilibrium is reached in simple settings (the below figure for example: S to G avoiding T).
Discounting factor discount the reward in further steps into value function to keep a balance between prudent or greedy actions.
is the discount factor. We can have the iterative equation
- Policy function
The policy function is a strategy to select the action based on value function. To make the policy robust and more adaptive, we make choice randomly based on probability propotional to value function for each state.
Training process: (1) initialize the policy function randomly—for example, let each state be chosen with probability proportional to its reward—and initialize the value function with the rewards; that is, set the reward of all states to zero where no direct reward is defined. Then (2) train the value function until convergence as above illustration figure, and (3) increase the probability of the action (moving from A to B) for a given state (state A) which most increases the reward (going from A to C might have a low or even negative reward value. Finally, (4) repeat from step (1) until the policy no longer changes.
- Q-learning
By combining the policy and value functions (which are highly interdependent), we are now with Q function. It is difficult to assine value function for each state in complicated settings. The arguments of Q function is current states and possible next actions.
If we treat state and action as row and column index, Q function is also a Q table. If the number of states is small enough, we can simply train the Q table by iterative similar as the above methods (an example on this). To train Q function for complicated states settings, we introduce deep Q-Learning approach which is the method behind alphaGO.
We introduce the NN whose input is state and action and the output is the Q value (practically the more efficient way to do this is as follows: input is the states and many outputs corresponds Q value for different actions). The loss function for such deep NN is
Given , the update rule of Q table is as follows:
- Do a feedforward pass for the current state s to get predicted Q-values for all actions.
- Do a feedforward pass for the next state and calculate maximum overall network outputs .
- Set Q-value target for action to (use the max calculated in step 2). For all other actions, set the Q-value target to the same as originally returned from step 1, making the error 0 for those outputs.
- Update the weights using backpropagation.
Additional, all experiences are stored in memory for training, this is called the experience replay trick. For a systematic introduction to Q-learning approach proposed by Deepmind, see this page and reference therein, for further development, see this post. It is worth noting there are lots of basic ideas and algorithms in the field of reinforce learning I don't mention there, see this question for an overview of more methods in reinforce learning.
Transfer Learning
Transfer learning study the possibility of how can one well trained model (works in source domain) apply in another scenario (target domain), this field in still in its very early stage.
See this answer for concepts and methods overview in transfer learning. (self-taught learning, multi-task learning, domain adaption included). The most intuitive example is the transfer learning of CNN. We believe with pretained CNN on other tasks as initial conditions, we only need fine-tuning parameters to make it work in other images or just train a new top layer of CNN for other tasks. See this post for some representative algorithms in transfer learning.
There is a close related concepts: meta learning. Meta learning concerns more general theory on how to learn to learn (how to determine hyperparameters in some efficient ways in a sense). See here for a brief introduction on related works.
Applications in Physics
First of all, as we can see from all previous examples in CS field, people invent new structures of model to fit the problem they are interested. So it is just the beginning of the game where physicits only use existing ML methods and NN structures to study physics problem. The ultimate goal of ML in physics is to invent new models which fit the nature of quantum or intrinsic property of related physic problems. You can never expect too much using tools for CV and NLP to solve problems in theoretical physics. People all know using NLP tools to classify image might not be a good idea, the same fact applies to current status of ML study in physics.
Below are some representative attempts by combining ML with condensed matter physics at the very beginning stage. I shall give some details in some work while just a brief summary for others. Most of the works below come from talks of APS March Meeting 2018 in LA.
As wavefunctions
Since NN is a mapping (input to output) and quantum wavefunction is also a mapping (configuration to amplitude), it is natural to use some NN architecture to construct wavefunctions. Due to the riched experiences and algorithms on how to tune and orginize parameters within NN, we can benefit a lot when using NN as a variation ansatz for wavefunction.
Use so-called RBM variational ansatz as Neural-Network Quantum States.
Reference: Science 355 6325 p602-606.
Similar NN structure as RBM with a visible layer and one hidden layer . And the wavefunction is defined as
In this case, all the weights parameters are complex number which is designed for the amplitude output. Strictly speaking, it is not RBM by noting that a model is not only defined by structure but also the training aim. They use the loss function of energy to train the model in supervised fashion, it is by no means the so called RBM. They call the training reinforce learning, again, it is still term abuse. The training is somewhat like EM algorithm: 1) based on the probability pick one wavefunction to compute the energy (the sampling and evaluating process is totally the same with variational Monte Carlo method in computational physics) and 2) use the energy as loss function to update the parameters .
The density here plays the role of bond dimension in DMRG. As is increasing, the wavefunction ansatz gives more accurate description of the wave function. They also utilize shift-invariant RBM to keep the translation symmetry in the model.
The test Hamiltonian: TFI and AFH model in 1 and 2D. It was reported that this approach is much more efficient than TNS calculation.
Exact RBM representation of topological states
Reference: arXiv: 1609.09060.
Exact analytical construction of further restricted RBM (local connections) states for 2D and 3D toric code groud and excited states (in a sense solve the groud state conditions by brute force).
NN representaion of tensor network
Reference: 1701.06246.
Any tensor network states can be arbitrarily well approximated by Boltzman machine. Any n qubit MPS of bond dimension D has NN rep (local Boltzmann machine) with hidden units and parameters.
Deep Boltzmann machine representing wavefunctions
Reference: Nature Communications 8, 662 (2017); arXiv: 1802.09558
Use three layer generalization of RBM as variational ansatz. Show the expression power of DBM is better than RBM (DBM is capable to express groud state of any Hamiltonian in polynomial time, but it doesn't imply the fact that one can calculate physical observables in efficient time). And also show the limitation of RBM from the discrepancy between the polyminal time to compute the wavefunction from RBM and wavefunction constructions which is NP hard to calculated from basis.
The latter paper give exact constructions on DBM of transverse Ising model and Heisenberg model using imaginary time evolution and Trotter decomposition.
Use RBM to represent density operator of mix states
Reference: 1801.09684.
Three layer structure of RBM with hidden layer in the middle to represent wavefunction and further give the expression on density operator functions (so called neural density operators): a step further compared to the nerual representaion of wavefunctions.
As classifiers or generators
Clustering, dimension reduction, classification, regression, etc., the tasks of ML share similarities with certain physics problems: determine phases, predict or properties of materials, locate phase boundaries, reveal order parameters, propose new sample as MCMC update methods and so on.
Classify phases of matter by neural networks
Reference: arXiv: 1605.01735
Simple FFNN is supervised training from Monte Carlo samples of 2D Ising spin configurations (both ferro and anti-ferro types). The trained NN has some transfer power to predict critical temperature correctly for other lattice intead of square lattice.
The author further considered Ising lattice gauge model whose Hamiltonian is the sum of the plaquette spins (product of spins on four bonds within a plaquette), where simple full connected NN fail to distinguish the high temperature phases from ground states. But they showed that CNN is capable to do this calssification task, by recoginizing local constraints instead of global topological order/ closed loop (they prove the mechanism between such CNN by distinguishing some special desinged states).
Unsupervised approaches to learn features
Reference: PRE 96, 022140 (2017).
Models: 2D Ising (ferro-or antiferro-) and 3D XY model.
Input: Monte Carlo samples in finite temperature.
Methods: PCA (or with kernel trick), AE, VAE (both with fully connected layer), manifold learning methods (tSNE, MDS).
Usage: locate phase transition (by latent variable or reconstruction loss), guess possible form of order parameters, reconstruction of smaples.
Learning phase transitions by confusion
Reference: arXiv: 1610.02048; arXiv: 1706.08111.
In the first work, they use entanglement spectrum instead of quantum wave fucntion as input of NN. Test models include Kitave chain, classical Ising model and MBL transition. The highlight of this work: confusion scheme: by assigning arbitrary critical point to train the model in supervised fashion and evaluate the accuray, we can obtain typical W shape accuracy curve whose middle peak is corresponding to the true critical point (if there is no phase transition, one may expect to get a V shape accuracy curve). Another byproduct: they find the fact that PCA fails for clustering data from MBL transition.
One more words, there is a similar trick as confusion scheme proposed in arXiv: 1707.00663, where the author scan the tuning parameter windows and evaluate the accuracy of NN to locate the phase boundary (supervised two end training for each sliding window).
In the second work, the authors extends their confusion scheme by including a guesser and make the phase transition detection an automatic self-learning method. The learner: NN with input some physics data and output the probability of phase; the guesser: Logistic regression with input the tuning parameter and output the probability of phase. The loss function of the model is the cross entropy between the two outputs. And finally one can get the critical value and confidence degree from the parameters of logistic regression for the guesser. For tuning parameters in higer dimension, the authors also introduce active contour model - the snake in CV field, to locate the high dimension phase boundary efficiently, which share the same spirit on find the object boundary in an image.
Benchmrak models: one-parameter classical 2D Ising model (Monte Carlo sample by reducing symmetry), two-parameters Bose-Hubbard model (mean field data of occupation number on each site), two-parameters 1D antiferromagnetic spin-1 Heisenberg chain with terms (eigenvalues of the reduce density matrix from iTEBD calculations).
Deep learning the distribution on Ising criticality
Reference: arXiv: 1708.04622.
This is a generalization of arXiv: 1606.02718, where RBM is used to fit the distribution of Ising model. This work use 2D Ising model samples from standard MCMC as trainning dataset and train generative models (RBM, DBM, DBN, DRBN) as MLE (or equivalently use KL divergence between distributions as loss function). The results of expectation value for physics observable is evaluated from each generator. Namely one generate new samples based on the generative model at hand and evaluate the expectation value of physical observables (energy or specific heat), then compare them to values from Monte Carlo. The authors show the accuracy essentially depends only on the number of neurons in the first hidden layer of the network, and not on other model details such as network depth or model type. Namely, shallow networks are more efficient than deep ones at representing physical probability distributions associated with Ising systems.
Data preprocessing may matter
Reference: arXiv:1611.01518; arXiv: 1710.09842.
The first work concerns so called quantum loop topography, which is a middleware between raw data of physics and fully connected NN. Only samples after QLT can be successfully recognized by NN (foucs on the topological phase transitions). QLT is defined as a complex vector on each sites whose elements are product of Green functions (unaveraged) via triangles including this site as a corner. Benchmark model: Chern insulator and fractional Chern insulator.
The second work concerns spin configuration () of 2D XY model: whether such raw configuration can be captured by NN. The results show that both FFNN and CNN only learn the residue of magnetization in finite size instead of the vortex unbinding mechanism in KT transition. So it is necessary to preprocess the spin configuration for model training. They also use confusion scheme with CNN to obtain the accuracy curve shape: only the model that learn from vertex has W shape curve (but the peak is still away from the true value of critical temperature). They even try to construct an architecture for detecting vortices as the first layers of NN, though the attempt is not so successful.
Learning phase transitions from dynamics with RNN
Reference: arXiv: 1712.00450.
This work construct LSTM to study dynamic of MBL and time crystal (3 phases) systems with magnetization over time as input sequences (ED results). The model is trained in supervised fashion with confident dataset in phase diagram. And we can get the full phase diagram accoding to the output of RNN (many to one structure).
As recommendation systems
Methods in this class don't affect the correctness of the physics problems. They are just some proposals to speed up conventional numerical calculations. The correctness of the results is guaranteed by rules beyond ML.
SLMC (self-learning Monte Carlo)
Reference: arXiv: 1610.03137, 1611.09364, 1612.03804, 1705.06724, 1801.01127.
Find an appropriate effective Hamiltonian where global update scheme works and use this Hamiltonian to propose in MCMC. The aim is to minimize the difference between weights from original model and effective model. And the difference is averaged in pre-trained Monte Carlo samples in small size. Since this is now reduced to a standard optimization problem, various ML approaches can be utilized in this effective model finding step: from ordinary regression to deep CNN.
Active learning on phase diagram searching
Reference: arXiv: 1803.03296.
The authors apply active learning framework on the phase diagram completion where the expert is further calculation (say Monte-Carlo or mean-field). The aim of the model is to propose the most informative point to be calculated next time. They use Gaussian process to evaluate the distribution of phase confidence and utilize exploration-exploitation trade-off to find the most promising state points. They also extend their approaches to batch case.
As other tools
Machine learning methods can do more in the field of physics: from the philosophy of renormalization group to the design of quantum algorithm counterpart.
RG flow from normalizing flow: NeuralRG
Reference: arXiv: 1802.02840.
Use stacked bijectors (realized by real NVP) to construct the bi-direction function , where represents the physical freedom while is a latent vector in low dimension space following normal distributions (possible drawback: always corresponds a Gaussian fixed point in noninteracting limit). Therefore, we can evaluate the probability of a physical configuration based on formular in normalizing flows as
To train this model, we use Adam optimizer on the loss function below: (where is the unnormalized probability which is easy to obtain from physics settings)
The usage of the model: 1) It can be used to generate new configurations of physics fields as Monte Carlo update proposals (which can also follow the Metropolis-Hastings acceptance rule), 2) and it can also used to estimate the partition function as its upper bound is the loss function. 3) Moreover, such model can reveal the states in each layer of bijectors to show the coarse-graining process visually when you sample a to generate real physical freedoms. 4) To make one step further, you can compute the partition fucntion in each layer (different energy scale) and extract effective interactions and terms under such RG flow.
The free energy is evaluated and benchmarked in 2D Ising model in this paper (in a sense, because practically the authors utilize the so called dual model of Ising model).
Mutual information, NN and RG
Reference: arXiv:1704.06279. (I recommend the published version in Nature Physics since the authors have made huge changes on the draft)
The initial aim of the paper is to extract the form of relevant freedom in real space RG process based on the construction of NN (RBM form). The weight of the RBM, namely weights in the link between visible fields and hidden freedom is viewed as the relation to extract the relevant freedom. Such RBM is trained by minimizing the mutual information between enviroment (separate region in visible layer surrouding visible freedom) and hidden freedom.
By stacking such RBM, you can even analyse the critical behavior quantitatively, though the result is not so promising and convincing in a sense. And you can comare this work of RBM based RG to the following paper arXiv: 1410.3831 in the next section.
Principle dimension of quantum states manifold
Reference: arXiv: 1711.10471.
The authors study quantum states with some parameters : how many dimensions such quantum states expand compared to the full Hilbert space. By utilizing SVD (PCA) of amplitude matrix or eigenvalue decomposition of density operator or correlation matrix, we can obtain the first several eigenvalues and their corresponding eigenvectors. For Haldane chian, they only use the first three basis to make the decomposition of ground states. Namely, the dimension of space for groud states of Haldane chain is only around 3 (corresponding 3 phases in the model: dimer, Haldane phase and gapless phase).
They further show that this pricinpal dimension is closely related to the second Renyi entropy as . And they use SSH model as a benchmark to evaluate the theory. (We omit the last part of the work on the relation between this dimension and quantum geometry)
Crystal graph CNN for prediction of material properties
Reference: arXiv: 1710.10324.
CGCNN: lattice structure - graph -CNN - properties. The graph allows multiple edges between nodes.
Properties: binding energy, band gap, Fermi energy, whether metal or not, etc.
Superconducor prediction
Reference: arXiv: 1709.02727.
Both regression and classfication models are constructed. Database: SuperCon, ICSD (test data). First classification problem seperating by . Then a regression model (predicting ) for materials above . (one can find an optimal threhold separation using confusion scheme) Model: random forest. They find the size of training data determins the accuracy of the model. And the model is also capable to differentiate the two families of High Tc: cuprates and Fe-based SC. (evaluated by training separately)
Further predictions: and 30+ more candidates. (shared feature: nearly flat abnds just below the energy of the highest occupied state)
Physics helps ML
Not only can we solve physics problem using ML tools, but physics toolkits can also help in ML study. There are two main perspectives on this fact. 1) Use principle of physics to understand the mechanism and effectiveness behind machine learning especially neural networks. 2) Invent new powerful ML tools with the help of tools or concepts in physics.
Exact mapping from the variational RG of Kadanoff to DNN of stacked RBMs
Reference: arXiv: 1410.3831.
Stacked RBM (eg. the second layers is the hidden layer of the first layer and the visible layer of the third layer) does real space RG tasks: both in formula correspondence and numerical sense. Examples include classical Ising model in 1 and 2D.
Why does deep and cheap learning work so well
Reference: J. Stat. Phys., 168, 6, 1223 (2017).
Why cheap: The probability distribution of data or Hamiltonian in physics prospective, is very limited compared to the exponential large space: low polyminal order, locality, symmetry.
Why deep: Hierarchical structure everywhere in physics (the philosophy of RG). Prove some form of non flatterning theorems.
Understanding image classification by one to one correspondence between image functions and quantum wavefunctions
Reference: arXiv: 1710.05520.
After introducing the one to one correspondence in Hilbert space, the author ustilize the concepts of entanglement entropy to measure the expressibility of CNN (the entanglement entropy of image function is proved to obey sub-volume law). The work use image loop recognizing as an example which is closely related to topological states.
TNS for image classification
Reference: arXiv: 1605.05775.
They utilize 1D MPS as network to classify the 2D MNIST data (arraged in 1D zigzag style). The advantage is that the bond dimension between tensors can be automatically adjusted to capture the image by sweeping algorithm. Such TNS can reach accuracy in MNIST.
TNS and RBM
Reference: arXiv: 1701.04831.
Practical implementation on the mapping between MPS and RBM and general equivalence between Boltzmann machine and TNS. .
As we can see, there are a variety of works on the relation between RG and deep learning. For the summary of works bridge the gap between RG and deep learning, you can see my blog for a brief review.
Main Reference
Series or books
- Some blog sites in Chinese: blog, blog, blog, blog, blog, blog, blog, blog
- Some blog sites in English: blog, blog, blog, blog, blog, blog, blog, blog
- Lei Wang's lecture notes: link
- Andrew Moore's slides: link
- Lectures of Universities: Berkeley, Stanford, Toronto, Unsupervised learning@Stanford, NLP@Stanford, reinforcement learning@Berkeley, advanced machine perception@Berkeley, crash course by google
- Other reference series: gitbook on some NNN algorithms, notes on NN, Nvidia blogs with tag deep learning, zhihuzhuanlan: some general resource, a book on deep learning
Papers or blogs
- The nature review on deep learning: Yann LeCun,Yoshua Bengio, Geoffrey Hinton: paper
- An integrated review and tutorial on machine learning in physics: paper (you may find the jupyter notebooks for implementation of ML approaches and enormous references therein helpful)
- A list of papers related with ML and physics: list
- See corresponding references links in the main text for other papers (note some of the links require you have access to certain academic journals) and blog posts (I apologize for the fact that many posts are written in Chinese).